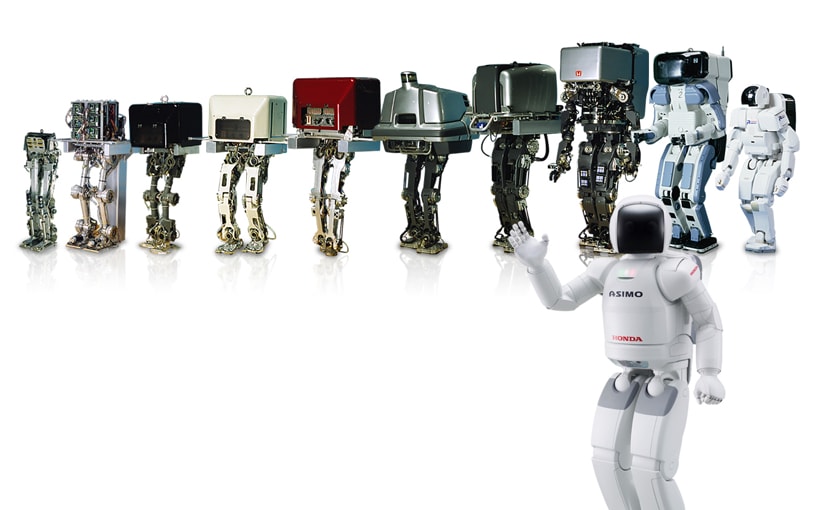
Waseda-Hitachi Leg II (WHL-11) iki ayaklı robot, 1985 yılında Japonya'da düzenlenen Tsukaba Fuarı'nda duyurulmadan önce robotlar sürünerek ya da tekerlek üzerinde hareket ederek yön bulabiliyorlardı. Hitachi'nin ürettiği bu iki ayaklı robot ise diğerlerinden farklıydı. Bu robot yürüyebiliyordu.
Hitachi ve Japonya'da bulunan Waseda Üniversitesi tarafından ortaklaşa geliştirilen bu robot üzerinde bir adet bilgisayar ve hidrolik piston bulunuyordu. WHD-11, düz bir yüzey üzerinde yürüyebilme yeteneğine sahipti ve robotun her bir adımı atması tam on üç saniyesini alıyordu. Robot ayrıca dönebiliyordu da.
Eğer bir robot insan gibi yürüyebilirse o zaman bu robotun yapabilecekleri sınırsızdır Merdivenlerden çıkıp inebilen ve nesnelerin etrafında dönerek hareket edebilen bir robot pek çok eylemi gerçekleştirebilir. Ancak bir robotun bunu yapabilmesi için tıpkı bir insanda olduğu gibi iki adet ayağa ihtiyacı vardır. İki ayaklı robot aynı zamanda düz olmayan yüzeylerde de yürüyebilir.
İki ayaklı robotların yürüme sistemleri, ilk zamanlarda düz bir yüzey üzerinde dengede durarak yürüyebilmeye odaklanmıştır. Dinamik denge ile yürüyebilen bir robotun kütle merkezi, robotun ayaklarının önceden belirlediği yerin dışına taşarsa robot, tıpkı bir insan gibi düşebilir. O yüzden robotun ayağı, tıpkı bir insanın ayağı gibi doğru bir açıda yere basabilmeli ve gerektiğinde farklı seviyelerde eğilebilmelidir. İnsan ayağının değişken ve esnek yapısı insanların düz olmayan yüzeylerde bile kolayca yürüyebilmesini sağlarken iki ayaklı robot için şimdilik bu söz konusu değildir. Bilim insanlarının robotlar üzerinde her geçen gün yaptığı çalışmalar sonucunda gelecekte robotların, tıpkı insanlar gibi çok farklı yüzeylerde düşmeden yürüyebilmelerini sağlayacaktır.